







RedHill Dual Motor Driver Board 12V-50V x 185A
RedHill Dual Motor Driver Board 12V-50V x 185A.
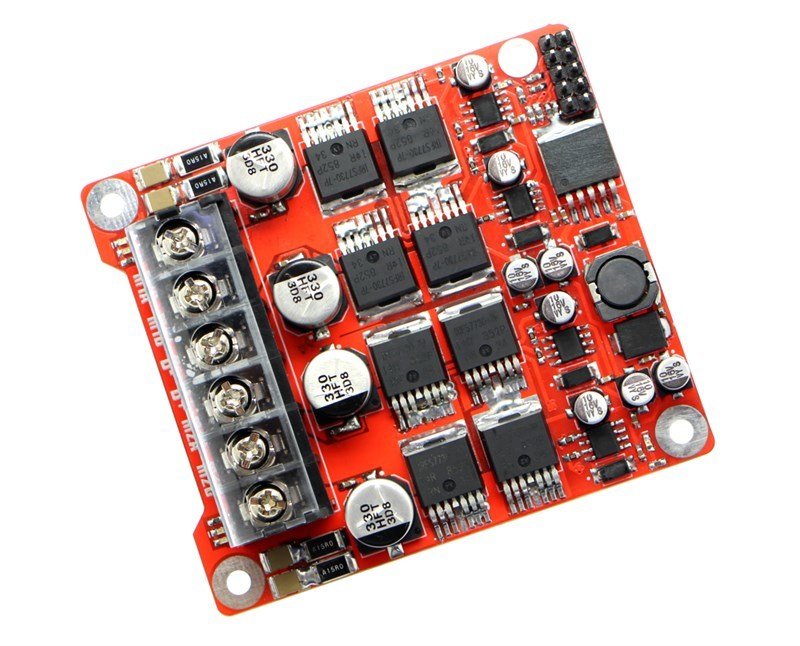
RedHill Dual Motor Driver Designed by Our Team For High Power Brushed DC Motor with current capacity up to 185A peak and 90A continuously Specialized For Mega Sumo Robot.
There are 2 H-bridge motor driver integrated on the board. With this circuit, you can easily use motors with high voltage and current.
In your robotics projects (sumo robot, terrain robot, mars reconnaissance robot, etc.), you can use the circuit that you can use in your R & D works with microcontroller, arduino and all development cards.
Caution ! : No Reverse polarity protection on power source Please ! Check your connection double times.

Technical specifications:
Two direction control for 2 brushed DC motor.
Minimum Operating Voltage: 12V (3 Cells Battery)
Maximum Operating Voltage: 50V (12 Cells Battery)
Continuous Output Current: 90A
Peak Output Current: 185 A
Maximum PWM Frequency: 32 kHz
Dimensions: 80 x 70 cm
Weight: 60 gram
| Truth Tables | |||
| Mx PWM1 | Mx PWM2 | Mx Enable | Mx Output |
| HIGH | LOW | HIGH | FORWARD |
| LOW | HIGH | HIGH | BACKWARD |
| HIGH | HIGH | HIGH | BRAKE |
| LOW | LOW | HIGH | BRAKE |
| x | x | LOW | SLEEP |


|
int m1En = 2; //set motors pins as a variable to pins int m1PWM1 = 5; int m1PWM2 = 6; int m2En = 7; int m2PWM1 = 9; int m2PWM2 = 10;
void setup() {
pinMode(m1PWM1,OUTPUT); // initialize needed digital pins as an output. pinMode(m1PWM2,OUTPUT); pinMode(m1En,OUTPUT); pinMode(m2PWM1,OUTPUT); pinMode(m2PWM2,OUTPUT); pinMode(m2En,OUTPUT);
digitalWrite(m2En,LOW); // stop m2 motor by making the m2Enable pin voltage LOW digitalWrite(m1En, LOW); // stop m1 motor by making the m1Enable pin voltage LOW analogWrite(m1PWM1,0); analogWrite(m1PWM2,0); analogWrite(m2PWM1,0); analogWrite(m2PWM2,0); delay(5000); // wait for 5 second
}
void loop() { // Forward digitalWrite(m1En, HIGH); // start m1 motor by making the m1Enable pin voltage HIGH digitalWrite(m2En, HIGH); // start m2 motor by making the m2Enable pin voltage HIGH analogWrite(m1PWM1, 245); // set the analog out value for m1 full speed turn clockwise analogWrite(m1PWM2, 2); // set the analog out value for m1 full speed turn clockwise analogWrite(m2PWM1, 245); // set the analog out value for m1 full speed turn clockwise analogWrite(m2PWM2, 2); // set the analog out value for m1 full speed turn clockwise delay(2000); // wait for 2 second // Backward digitalWrite(m1En,HIGH); // start m1 motor by making the m1Enable pin voltage HIGH digitalWrite(m2En,HIGH); // start m2 motor by making the m2Enable pin voltage HIGH analogWrite(m1PWM1,2); // set the analog out value for m1 full speed turn counterclockwise analogWrite(m1PWM2,245); // set the analog out value for m1 full speed turn counterclockwise analogWrite(m2PWM1,2); // set the analog out value for m2 full speed turn counterclockwise analogWrite(m2PWM2,245); // set the analog out value for m2 full speed turn counterclockwise delay(2000); // wait for 2 second
}
|