



Ardupilot APM 2.8 Flight Controller
Introduction:
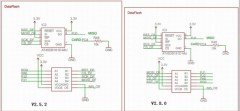
Eliminate V2.52 Version Old 1.0mm 6P SM06B GPS interface , changed to the DF13-4P compass external I2C interface, Place the DF13-5P GPS interface with external interfaces of the compass , more convenient to connections GPS with external compass.
Replaced the V2.52 I2C interface to multi-purpose MUX interfaces, which can be used by the users themselves through the Pad of Back Board freely configurable function output, UART0,UART2,I2C,OSD optional, defaults OSD interface, avoiding 2.52 version when you want to use both Data Transmission and OSD, you need to use Y-line separating the interface programme. Improved OSD interface when used in conjunction with Data Transmission, because of the isolation resistance, more effective to avoid the interference of Data Transmission.
New V2.8.0 use United States semi-LP2985-3.3, pressure-resistant up to 16V, increased reliability, reduced probability of Bad Gyro health due to voltage problems.
Features:
- Arduino Compatible!
- Can be ordered with top entry pins for attaching connectors vertically, or as side entry pins to slide your connectors in to either end horizontally
- Includes 3-axis gyro, accelerometer and magnetometer, along with a high-performance barometer
- Onboard 4 MegaByte Dataflash chip for automatic datalogging
- Optional off-board GPS, uBlox LEA-6H module with Compass.
- One of the first open source autopilot systems to use Invensense\'s 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
- Atmel's ATMEGA2560 and ATMEGA32U-2 chips for processing and usb functions respectively.
1. data transmission port
2. analog sensor port
3. autostability gimbal output
4. ATMEGA2560 SPI online programming port (be useful for optical flow sensor)
5. USB port
6. remote control input
7. function selection jumper
8. GPS port
9. 12C external compass port
10. ATMEGA32U2 SPI online programming port
11. multifunction configurable MUX port (OSD is the defaulted output)
12. current voltage port
13. ESC power supply selection jumper
14. ESC output port